高中 | 双棒模型 题目答案及解析
稿件来源:高途
高中 | 双棒模型题目答案及解析如下,仅供参考!
选修3-2
第四章 电磁感应
4.4 法拉第电磁感应定律
双棒模型
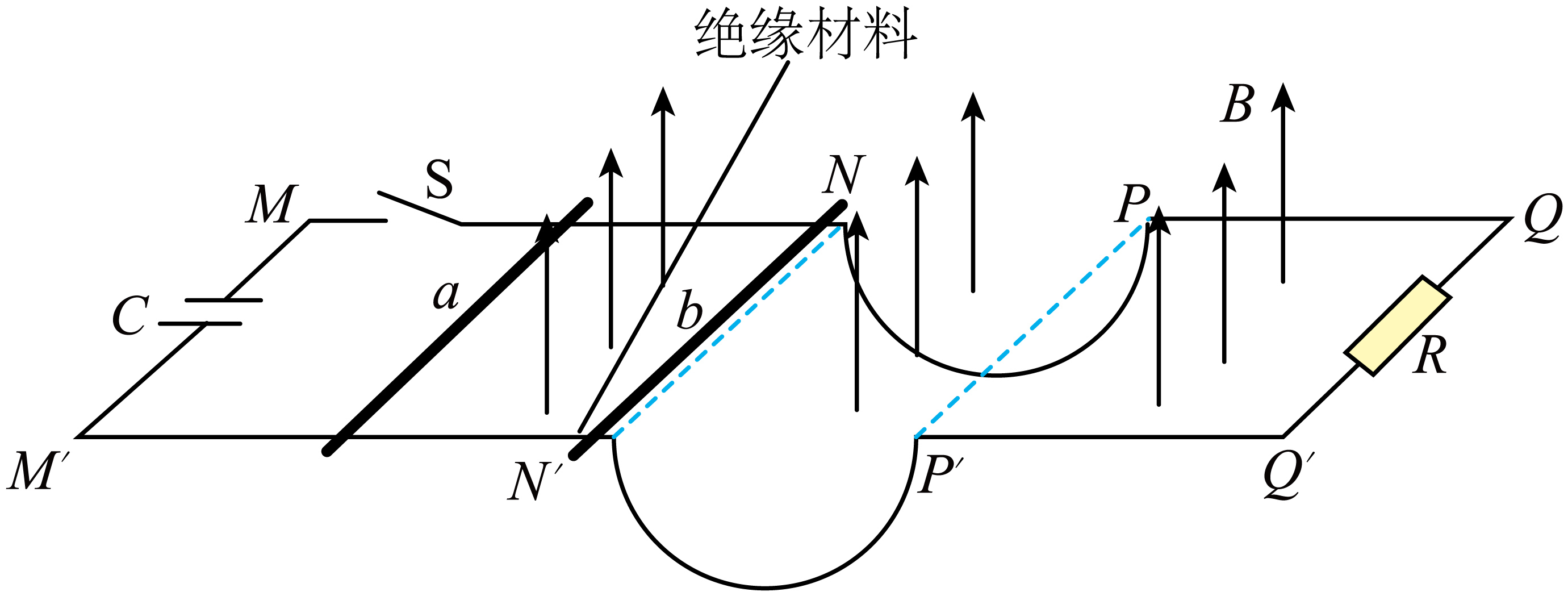
如图所示,间距$L=1\;\rm m$的导轨$MNPQ$、$M'N'P'Q$水平放置,$NP$、$N'P'$为半径$r=0.4\;\rm m$的半圆弧,其中$NN'$是一小段的绝缘材料,其余部分均导电,水平轨道和半圆弧轨道平滑连接。$MM'$处连接一充满电的电容器,电容$C=0.1\;\rm F$,$MN$、$M'N'$上垂直导轨放置两根质量均为$m=0.1\;\rm kg$的导体棒,$b$棒放在绝缘处,$a$棒在$b$棒左侧且相距足够远,$QQ'$连接有一$R=1\;\rm \Omega$的定值电阻。整个装置处于竖直向上磁感应强度$B=1\;\rm T$的匀强磁场中,接通开关$\rm S_{1}$,$a$棒被弹射出后与$b$棒发生弹性碰撞,碰后给$b$棒施加外力使其沿轨道匀速率运动,$b$棒运动至最低点时受到的支持力$F_{\rm N}=2\;\rm N$,运动到$PP'$时撤去外力后使其沿水平轨道自由滑行直至停止,运动过程中$a、b$棒始终与导轨垂直且接触良好。不计其他电阻,忽略一切阻力,取$g=10\;\rm m/s^{2}$、$\pi=3$,求:
$b$棒运动到最低点回路中的感应电流大小;
$2\\;\\rm A$
"]]$b$棒运动至最低点,由牛顿第二定律$F_{\text{N}}-mg= m\dfrac{v_{b}^{2}}{r}$
代入题中数据,解得$v_{b}=2\;\rm m/s$
则电流$I=\dfrac{E}{R}=\dfrac{BLv_{b}}{R}=2\;\rm \text{A}$
电容器初始时的电压$U_{0}$及弹射$a$棒释放的电荷量$q$;
$U_{0}=4\\;\\rm V$,$q=0.2\\;\\rm C$
"]]质量相等的$a$、$b$棒发送弹性碰撞,速度互换,可知碰前$a$棒速度$v_{a}=v_{b}=2\;\rm m/s$,规定向右为正方向,对$a$棒,由动量定理有$∑BIL ⋅ \Delta t=m_{a}v_{a}$
因为$BIq=m_{a}v_{a}$
联立解得$q=0.2\;\rm C$
电容器释放电荷量与通过$a$棒的电荷量相等,则$q=C(U_{0}-U')$
$a$棒被弹射时运动距离足够长,可知$a$棒的电动势与电容器的电压相等,即$U'=BLv_{a}=2\;\rm V$
联立求得$U_{0}=4\;\rm V$
整个过程中$R$上产生的焦耳热。
$1.4\\;\\rm J$
"]]$b$棒在圆弧运动时产生的感应电动势等效为正弦式交变电流,电动势有效值$E_{有}=\dfrac{E}{\sqrt{2}}= \sqrt{2}\;\rm \text{V}$
产生的焦耳热$Q_{1}=\dfrac{E_{有}^{2}}{R}t$
联立解得$Q_{1}=1.2\;\rm J$
撤去外力后,$b$棒的动能全部转化为焦耳热$Q_{2}=\dfrac{1}{2}m_{b}v_{b}^{2}=0.2\;\rm \text{J}$
故整个过程中$R$上产生的焦耳热$Q=Q_{1}+Q_{2}=1.4\;\rm J$
高中 | 双棒模型题目答案及解析(完整版)
