| 双棒模型 题目答案及解析
稿件来源:高途
| 双棒模型题目答案及解析如下,仅供参考!
选修3-2
第四章 电磁感应
4.4 法拉第电磁感应定律
双棒模型
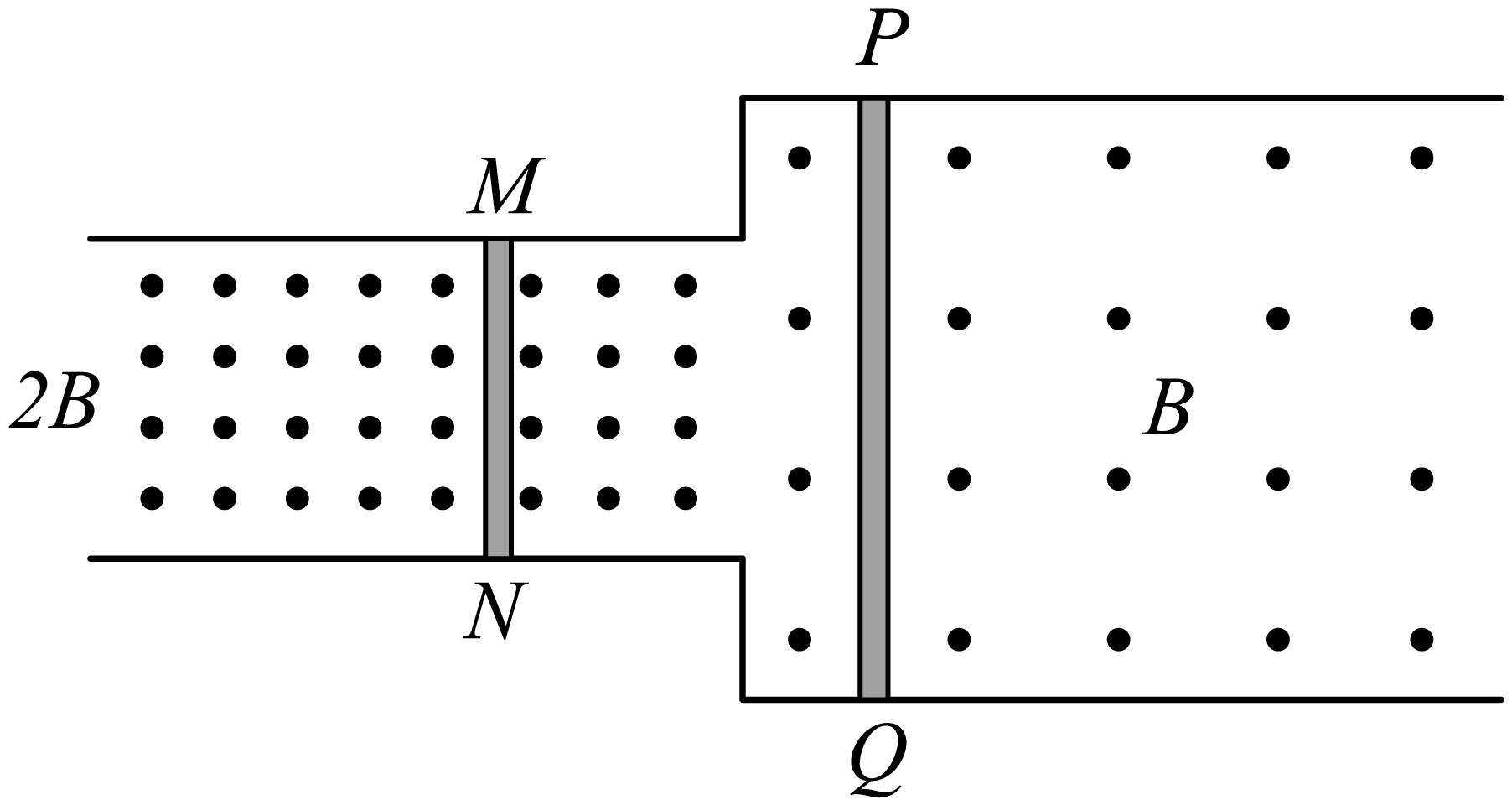
如图,两根光滑平行金属导轨固定在绝缘水平面上,左、右两侧导轨间距分别为$d$和$2d$,处于竖直向上的磁场中,磁感应强度大小分别为$2B$和$B$。两导体棒$MN$、$PQ$垂直放置在导轨上,已知导体棒$MN$的电阻为$R$、长度为$d$、质量为$m$,导体棒$PQ$的电阻为$2R$、长度为$2d$,质量为$2m$。$0$时刻,用水平恒力$F$向右拉动$PQ$,此后运动了足够长时间$t$,运动过程中,两导体棒均未脱离原宽度处的导轨且与导轨保持良好接触。已知导轨足够长且电阻不计,从$0$时刻到$t$时刻的过程中,下列说法正确的是$(\qquad)$
回路中始终产生顺时针方向的电流
","$PQ$加速度为$a$时,$MN$的加速度为$2a$
","$t$时刻后两导体棒的速度差恒为$\\dfrac{FR}{4{{B}^{2}}{{d}^{2}}}$
","通过两导体棒的电量为$\\dfrac{Ft}{6Bd}-\\dfrac{mFR}{12{{B}^{3}}{{d}^{3}}}$
"]$\rm A$.设导体棒$PQ$和$MN$的速度分别为${{v}_{1}}$和${{v}_{2}}$,加速度分别为${{a}_{1}}$和${{a}_{2}}$,产生的感应电动势分别为${{E}_{1}}$和${{E}_{2}}$,$0$时刻回路中的电流为零,导体棒$MN$的加速度为$0$,导体棒$PQ$有向右的加速度,此后两棒均向右加速,但${{a}_{1}}\gt {{a}_{2}}$
所以${{v}_{1}}\gt {{v}_{2}}$
又${{E}_{1}}=B\cdot 2d{{v}_{1}}=2Bd{{v}_{1}}$,${{E}_{2}}=2Bd{{v}_{2}}$
所以${{E}_{1}}\gt {{E}_{2}}$
根据左手定则可知,回路中总的感应电动势等于两棒产生的感应电动势之差,所以回路中总的感应电动势方向与导体棒$PQ$产生的感应电动势方向相同,导体棒$PQ$产生的感应电动势方向为$P\to Q$,所以回路中的电流沿顺时针方向,回路中的电流$I=\dfrac{{{E}_{1}}-{{E}_{2}}}{2R+R}=\dfrac{2Bd\left( {{v}_{1}}-{{v}_{2}} \right)}{3R}$
导体棒$PQ$和$MN$的加速度分别为${{a}_{1}}=\dfrac{F-2BId}{2m}$,${{a}_{2}}=\dfrac{2BId}{m}$
随着时间推移,${{v}_{1}}-{{v}_{2}}$越来越大,回路中的感应电流越来越大,${{a}_{1}}$减小${{a}_{2}}$增大,经过足够长的时间后,两棒的加速度相等,此后${{v}_{1}}-{{v}_{2}}$保持不变,两棒匀加速运动下去,所以从$0$时刻到$t$时刻的过程中,回路中始终产生顺时针方向的电流,故$\rm A$正确;
$\rm B$.在两棒的加速度达到相等之前,$a_{1}$减小$a_2$增大,两棒的加速度大小并不是恒定的倍数关系,故$\rm B$错误;
$\rm C$.$t$时刻后${{a}_{1}}={{a}_{2}}$
解得$I=\dfrac{F}{6Bd}$
又$I=\dfrac{2Bd\left( {{v}_{1}}-{{v}_{2}} \right)}{3R}$
解得${{v}_{1}}-{{v}_{2}}=\dfrac{FR}{4{{B}^{2}}{{d}^{2}}}$,故$\rm C$正确;
$\rm D$.通过两导体棒的电量为$q$,根据动量定理,对导体棒$PQ$和$MN$分别有$Ft-B\bar{I}\cdot 2d\cdot t=2m{{v}_{1}}-0$,$2B\cdot \bar{I}dt=m{{v}_{2}}-0$
又$\overline{I}t=q$,${{v}_{1}}-{{v}_{2}}=\dfrac{FR}{4{{B}^{2}}{{d}^{2}}}$
联立得$q=\dfrac{Ft}{6Bd}-\dfrac{mFR}{12{{B}^{3}}{{d}^{3}}}$,故$\rm D$正确。
故选:$\rm ACD$。
| 双棒模型题目答案及解析(完整版)
