| 双棒模型 题目答案及解析
稿件来源:高途
| 双棒模型题目答案及解析如下,仅供参考!
选修3-2
第四章 电磁感应
4.4 法拉第电磁感应定律
双棒模型
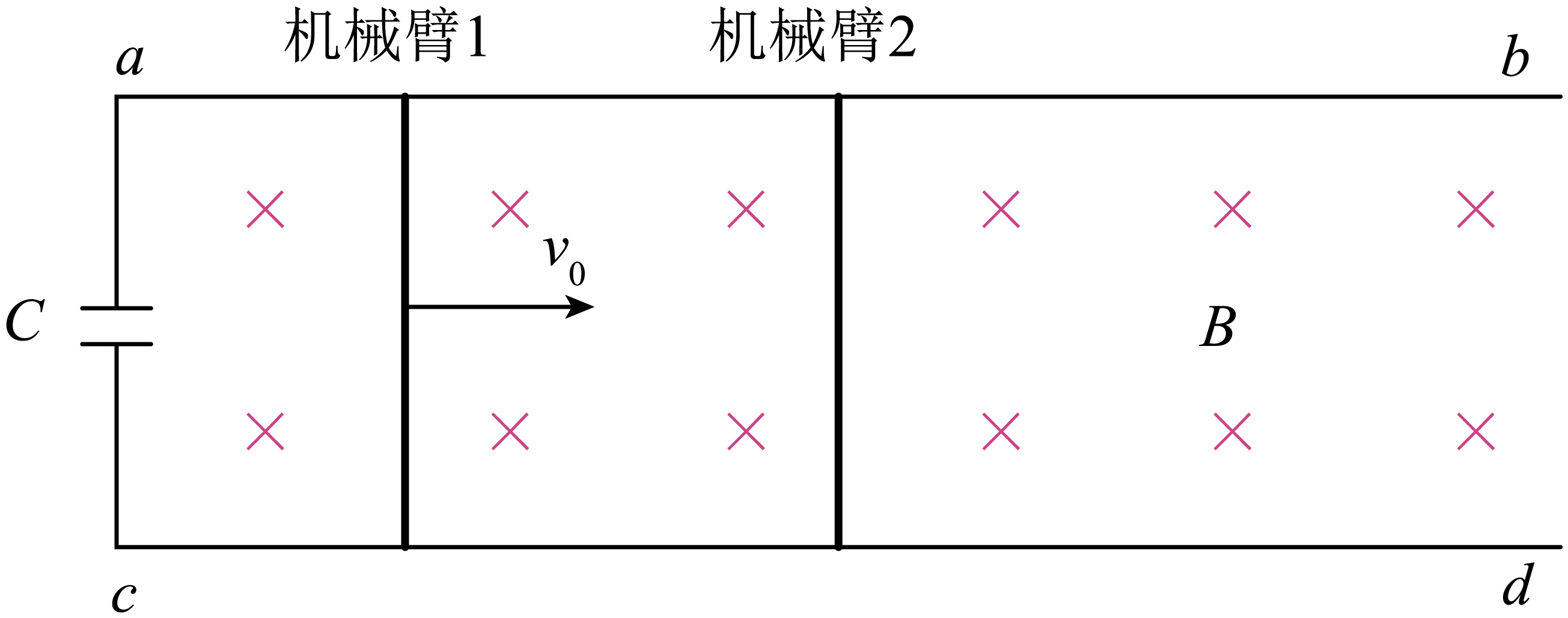
在自动化装配车间,常采用电磁驱动的机械臂系统,如图,$ab$、$cd$为两条足够长的光滑平行金属导轨,间距为$L$,电阻忽略不计。导轨置于磁感应强度大小为$B$,方向垂直纸面向里的匀强磁场中,导轨上有与之垂直并接触良好的金属机械臂$1$和$2$,质量均为$m$,电阻均为$R$。导轨左侧接有电容为$C$的电容器。初始时刻,机械臂$1$以初速度$v_{0}$向右运动,机械臂$2$静止,运动过程中两机械臂不发生碰撞。系统达到稳定状态后,电流为零,两机械臂速度相同。
求初始时刻机械臂$1$的感应电动势大小和感应电流方向;
$BLv_{0}$,沿机械臂$1$向上
"]]由法拉第电磁感应定律可知,初始时刻机械臂$1$的感应电动势大小为$E=BLv_{0}$
由右手定则可知感应电流方向沿机械臂$1$向上。
系统达到稳定状态前,若机械臂$1$和$2$中的电流分别为$I_{1}$和$I_{2}$,写出两机械臂各自所受安培力的大小;若电容器两端电压为$U$,写出电容器电荷量的表达式;
$BI_{1}L$,$BI_{2}L$,$Q=CU$
"]]在达到稳定前,两机械臂电流分别为$I_{1}$和$I_{2}$,两机械臂安培力的大小分别为$F_{1}=BI_{1}L$,$F_{2}=BI_{2}L$
设电容器所带电荷量为$Q$,则$Q=CU$
求系统达到稳定状态后两机械臂的速度。若要两机械臂不相撞,二者在初始时刻的间距至少为多少?
$\\dfrac{mv_{0}}{CB^{2}L^{2}+ 2m}$,方向向右;$\\dfrac{mv_{0}R}{B^{2}L^{2}}$
"]]达到稳定$I_{1}=I=0$时,两机械臂的速度相同,产生的感应电动势与电容器的电压相等,回路中没有电流结合($2$)问的分析可知此时$I_{1}=I_{2}=0$,$U=\dfrac{BLmv_{0}}{2m+B^{2}L^{2}C}$
同时$U=BLv$
可得两机械臂的速度为$v=\dfrac{mv_{0}}{2m+B^{2}L^{2}C}$
方向向右
结合($2$)问分析,在任意时刻有$U=BLv_{1} − I_{1}R=BLv_{2}+I_{2}R$
即$BL(v_{1} − v_{2})=I_{2}R+I_{1}R$
对该式两边取全过程时间的累计有$BL(v_{1} − v_{2})\Delta t=I_{2}R\Delta t+I_{1}R\Delta t$
其中$(v_{1} − v_{2})\Delta t=x_{1} − x_{2}=d_{\min}$,$I_{1}\Delta t=Q_{1}'$,$I_{2}\Delta t=Q_{2}'$
即$BLd_{\min}=(Q_{1}'+Q_{2}')R$
从开始到最终稳定的过程中,对机械臂$1$和机械臂$2$分别根据动量定理有
$-B\overline{I}_{1}'L\cdot\Delta t=mv-mv_{0}$,$B\overline{I}_{2}'L\cdot\Delta t=mv$
即$BLQ_{1}'=mv_{0}−mv$,$BLQ_{2}'=mv$
可得$BL(Q_{1}'+Q_{2}')=mv_{0}$
联立解得稳定时的速度和两棒间初始距离的最小值为$d_{\min}=\dfrac{mv_{0}R}{B^{2}L^{2}}$
| 双棒模型题目答案及解析(完整版)
